CREDIT: COURTESY OF ACM SIGGRAPH 2017
To this very day, new innovations rely on the brilliant incite of Greek mathematician, physicist, Archimedes (c. 287 – c. 212 BC). Archimedes’ principle which is fundamental to fluid mechanics, in simple terms says that if you place an object in a stationary fluid than the weight of the displaced fluid is equivalent to the weight of the object. A global team from Tel-Aviv University, Ben-Gurion University, University of British Columbia and Shandong University have used this principle to more fully reconstruct 3-D objects that have challenging shapes. The team of computer scientists and engineers applied Archimedes’ fluid displacement principal to turn current 3-D modeling surface reconstruction challenges into a volumetric problem.
The implementation of 3-D reconstruction has always been a difficult science challenge, typically implemented in some fashion using a laser rangefinder, to attain the depth map, or passively using an image sensor to quantify the light reflected back from the surface of the target object. However, these approaches have a common flaw besides being noisy. They only capture what is visible to them, but parts hidden from the sensors line of sight are not picked up, so you end up with an imperfect reproduction.
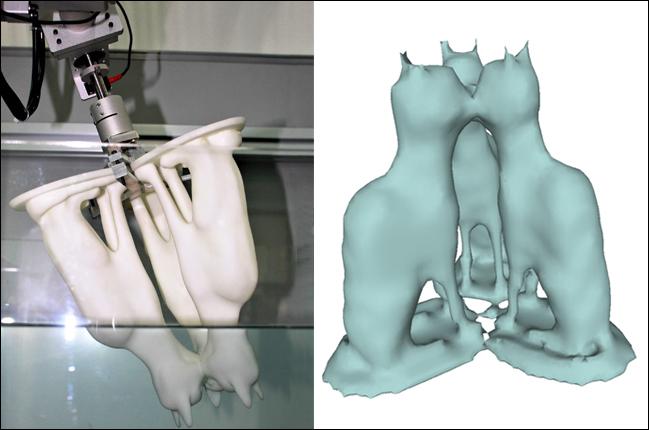
Now with this new innovative data collection scanning method that will be presented at SIGGRAPH 2017 in Los Angeles, 30 July to 3 August, coined as “Dip Transform for 3-D Shape Reconstruction,” it correctly reconstructs even the hidden hard to sense components of an object in 3-D. As the ‘dip part’ of the name implies the target object is immersed in a liquid, which has the benefit of being able to cover all curves, twists, and cavities. Liquid also solves the optical limitations of today’s common scanning devices used to handle non-opaque materials that have transparent or shiny surfaces.
In the study, the team implemented a low-cost 3-D dipping technology (photo above) that uses optical systems related to but without the disadvantages of computed tomography. The target objects of varying complexity were dunked in water repeatedly at different angles with a robotic arm to measure the liquid volume displacement. Each of these dunks helped mold a sequence of thin volume slices of the complex shape to piece together the entire topology of the target object.
For the full paper please visit here.






{kind=link}